天上飞、水里游,“TJ-FlyingFish”(同济飞鱼)受到国际关注
来源:上海自主智能无人系统科学中心
时间:2023-02-08 浏览:
2月6日,总部位于伦敦的高水平国际科技杂志“NewScientist”(《新科学家》)报道了同济大学上海自主智能无人系统科学中心、全国重点实验室与香港中文大学团队联合研发的创新成果水空跨域巡航器原型机——“TJ-FlyingFish”(同济飞鱼)。这是一种水陆两栖飞行器,在空中像无人机一样飞行,入水后像潜水器一样运行。“NewScientist” 评论道:“该水空跨域巡航器原型机可以在水和空气两种介质中自由切换。它既可以充当两个无人系统之间不可替代的通信节点,加强信息的融合与共享,也可独立应用于跨域探测、遥感及灾害救援等场景。”
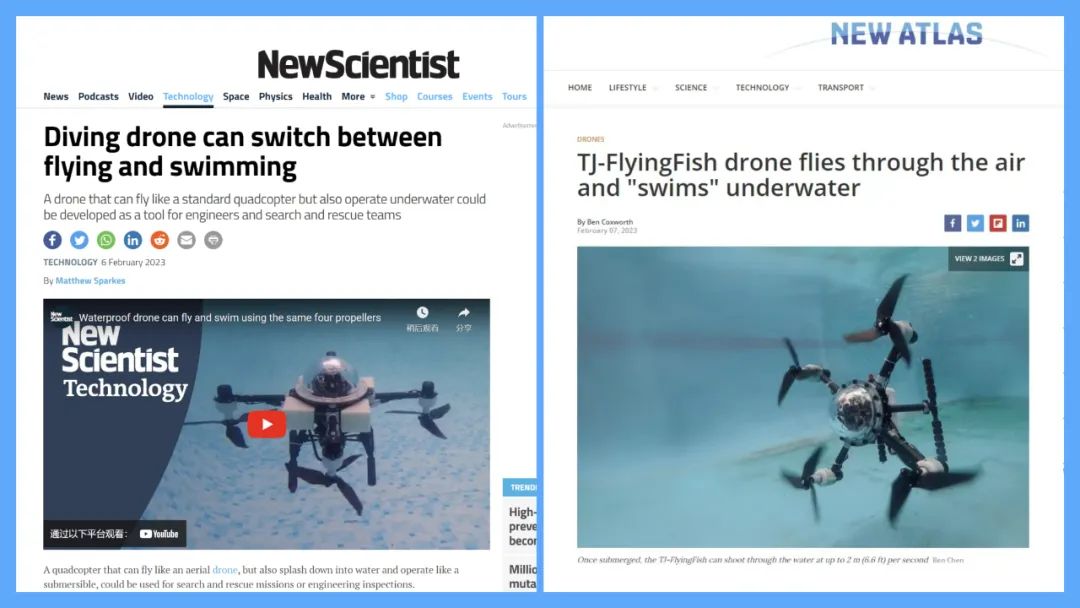
继该报道后,北美New Atlas等国际科技杂志也陆续对这一成果进行了重点报道。该研究论文成果“TJ-FlyingFish: Design and Implementation of an Aerial-AquaticQuadrotor with Tiltable Propulsion Units”已被世界机器人领域最具影响力的顶级国际会议“IEEE International Conference on Robotics and Automation”接收并先期在线发表于ArXiv上。
随着无人系统技术的不断发展,无人系统的跨域协同凭借其诸多优势成为当前无人系统领域研究和应用的热点。将可在海、陆、空等空间域内运行的、具有功能差异性的多无人平台组成有机整体,使其相互间可通过信息共享与融合、行为交互与协调、任务协同与合作的方式实现功能互补,将极大提升整体无人系统对跨域复杂环境的应对能力,对于提高全域通感导技术具有十分重要的作用。然而,在水和空气两种介质之间,使用传统通信技术难以实现跨介质节点间有效的信息传递,制约了无人系统在该场景下的跨域协同。因此,研制具有跨域穿梭和巡游能力的无人平台,使其在跨域协同系统中充当信使角色,实现跨介质节点间的信息传递与交互,是解决无人系统跨域协同的有效手段。
对此,由中国工程院院士陈杰教授和新加坡工程院院士Ben M. Chen教授率领的团队研发了水空跨域巡航器原型机“同济飞鱼”。其采用了搭载水空两用推进单元和舵面倾转机构的四旋翼构型设计,重量为1.63千克,轴距为380毫米,具备跨域穿梭能力,又具备双域巡航能力,可在空中悬停6分钟,在水下巡游约40分钟。

“同济飞鱼”测试中
水和空气两种介质的流体力学特性的不同,对推进器工作区间和系统整体工作平衡点提出了截然不同的要求。针对跨介质推进问题,巡航器搭载微型双速齿轮箱实现推进器工作区间的切换,以适应不同介质环境,大大简化结构和减低重量,同时保证了在两介质中的运行效率;针对系统平衡点问题,巡航器在传统旋翼飞行器的基础上,增加了舵面倾转自由度,在水下改变推力矢量方向以切换系统工作模态,通过结构上的变化满足水空两介质对系统平衡点的不同要求,极大提高了跨域操控性和机动性。除此之外,巡航器本体搭载了由GPS、惯性测量单元(IMU)、深度计和微型多普勒速度计(DVL)组成的跨域定位导航系统,具备水下、空中和跨介质过程中的自动操控能力。
同济大学勇担新时代新使命,紧密对接国家人工智能发展战略,积极打造人工智能国家战略科技力量,以人工智能赋予传统学科发展新动能,提升传统优势学科新内涵。同济大学上海自主智能无人系统科学中心成立4年来,已在重大重点项目有组织科研开展、智能科学与技术高峰学科建设、高端人才引育、博士生培养、重大科技基础设施建设、多学科交叉融合、产学研合作等方面取得重要进展,围绕重点研究方向的基础理论、关键核心技术和技术应用成果突出,获批首批全国重点实验室、教育部前沿科学中心、智能科学与技术交叉学科博士点,国际影响力大幅提升。

此次科学中心联合香港中文大学团队研发的 “同济飞鱼”,结合科学中心研发的水下“海鳗”“大力水手”软体机器人等系列智能装备,有望支撑国家海洋安全和资源勘探等重大战略及需求。
相关论文链接:arxiv.org/abs/2301.12344



